III.3.Mode 2 : Taux d'approche excessif.
Le mode 2 fournit des alertes et des avertissements quand le
taux d'approche au terrain est très grand. Il a deux sous modes, le sous
mode 2A et le sous mode 2B. Ce mode dépend du mach, le l'altitude, du
taux barométrique et de la configuration de l'avion (position des flaps
et des trains d'atterrissage).
1. Le sous mode 2A : Le sous mode 2A se
produit pour un grand taux d'approche si les Flaps (volets) sont moins de 25
unités (pas dans la configuration d'atterrissage c'est-à-dire
inférieur a 30 unités). Ce sous mode peut avoir un état
d'alerte ou un état d'avertissement. Pour un état d'alerte,
l'EGPWS donne le message auditif << Terrain Terrain » et le DEU
affiche << Pull Up ». Si il y'a une augmentation de taux d'approche,
le EGPWS donne un avertissement et le message <<Whoop Whoop Pull Up
» sera changé par le message <<Terrain ». (Fig.
III.3)
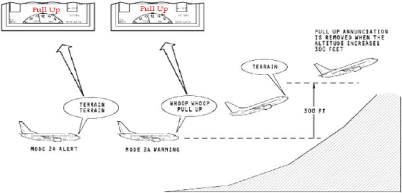
Figure III.3 : sous mode 2A (Taux d'approche
excessif).
2. Le sous mode 2B : Le sous mode 2B donne
des alertes pour un grand taux d'approche si les Flaps sont dans la
configuration d'atterrissage (plus de 30 unités). Ce sous mode peut
aussi donner des alertes et des avertissements si les Flaps (volets) sont dans
la configuration d'atterrissage et l'angle du Glide Slope et la
déviation du Localizer est moins de deux points (dots) pendant une
approche ILS. (Fig. III.4). Le sous mode 2B peut avoir un état d'alerte
ou un état d'avertissement. L'EGPWS donne une alerte sous forme de
message auditif <<Terrain Terrain>> pour un grand taux d'approche,
si les trains d'atterrissage et les Flaps sont dans la configuration
d'atterrissage ou quand les trains d'atterrissage ou bien les Flaps ne sont pas
dans la configuration d'atterrissage. Si l'alerte continue, l'EGPWS donne le
message auditif << Whoop Whoop Pull Up >>.
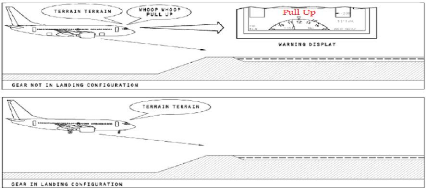
Figure III.4 : Sous mode 2B (Taux d'approche
excessif).
Les alertes du sous mode 2A se produisent entre 30 et 1650
pieds de radio altitude, pour des vitesses anémométrique moins de
220 noeuds. La limite supérieure est de 2450 pieds de radio altitude
pour des vitesses anémométriques entre 220 et 310 noeuds. Et les
alertes du sous mode 2B se produisent entre 30 et 789 pieds de radio altitude.
La limite inférieure change entre 30 et 600 pieds de radio altitude.
L'EGPWS emploie le taux de descente et la position des Flaps (volets) pour
calculer la limite inférieure. (Fig. III.5).
Les LRUs (Line Remplaçable Unit) assurent les
différentes entrées pour l'opération du mode 2 en
utilisant :
- Les émetteurs et récepteurs de la radio
altitude;
- L'ADIRU gauche;
- Le module d'EGPWS ;
- L'amortisseur de lacet de gestion de décrochage (SMYD) ;
- Les MMRs1 et 2.
Ces différents équipements assurent les
différentes données utilisées par l'EGPWS pour
détecter les alertes et les avertissements du mode 2. (Fig. III.5).
Ces différentes données sont :
- La radio altitude;
- La vitesse verticale inertielle (IVS) ;
- Le taux barométrique calculé ;
- La position des volets et des trains d'atterrissage ;
- Le Glide Slope et le Localizer.
Quand il y'a un avertissement (danger) au vol, le
détecteur de mode envoie un signal discret au EGPWS pour donner les
messages auditifs avancés. Les messages auditifs vont à la REU
(Remote Electronique Unit) qui les envoie aux haut-parleurs du poste de
pilotage.
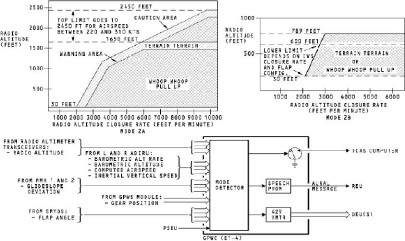
Figure III.5 : Principe de fonctionnement du
mode 2. III.4.Mode 3 : Perte d'altitude après
décollage.
Les alarmes du mode 3 se déclenchent lorsqu'il ya une
grande perte d'altitude après décollage.
Lorsque l'avion atteint 1500 pieds de radio altitude, le mode 3
devient non fonctionnel. Il a deux sous modes, le sous mode 3A et le sous mode
3B. (Fig. III.6).
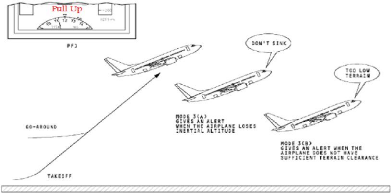
Figure III.6 : Mode 3 (Pertes d'altitude
après décollage).
1. Le sous mode 3A : le sous mode 3A donne
des alertes quand l'avion perd l'altitude après décollage. La
perte dépend du taux d'élévation et de l'altitude de
l'avion. Le message auditif qui sera entendu est <<Don't Sink ».
2. Le sous mode 3B : le sous mode 3B donne
des alertes pour un dégagement minimum de terrain. Le dégagement
de terrain augmente lorsque l'altitude de l'avion est élevée
pendant le décollage. Ce mode donne le message auditif << Too Low
Terrain ».
Le mode 3 fonctionne quand l'une de ces conditions est vraie :
- L'avion s'élève après être
allé en dessous de 245 pieds quand l'avion est dans sa configuration
d'atterrissage (c'est-à-dire les trains d'atterrissage sortants et les
volets plus grand que 30 unités);
- L'avion décolle. (Fig. III.7).
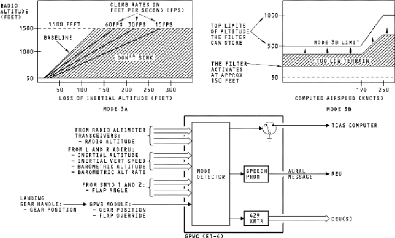
Figure III.7 : Principe de fonctionnement du
mode 3.
Les alertes du mode 3A se produisent entre 30 et 1500 pieds et
changent selon le taux d'altitude de l'avion, et les alertes du mode 3B se
produisent lorsque l'altitude de l'avion est inférieur a celle
calculé par l'EGPWS.
| 
